Do you know, że… ?
When defining the Simulation study, one of the steps is to set the conditions for cooperation of individual parts (lub obiektów – w częściach wieloobiektowych). The default type is a global contact bound..
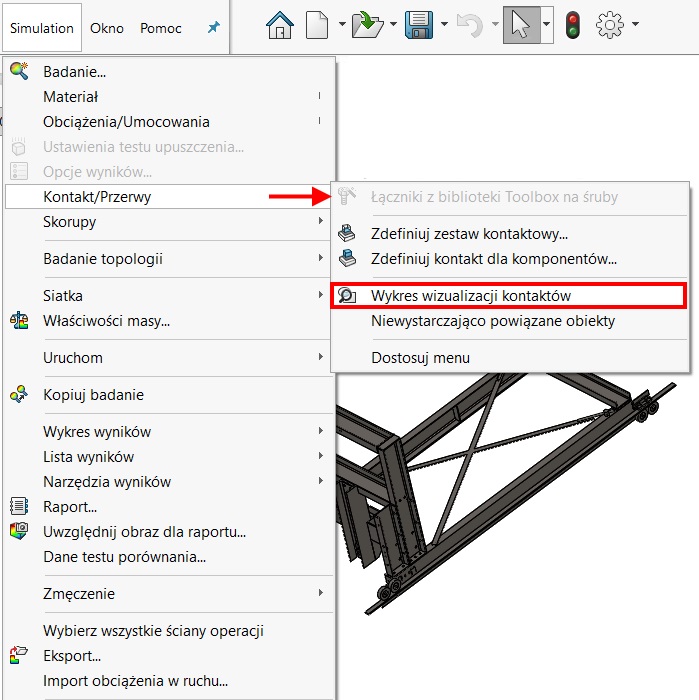

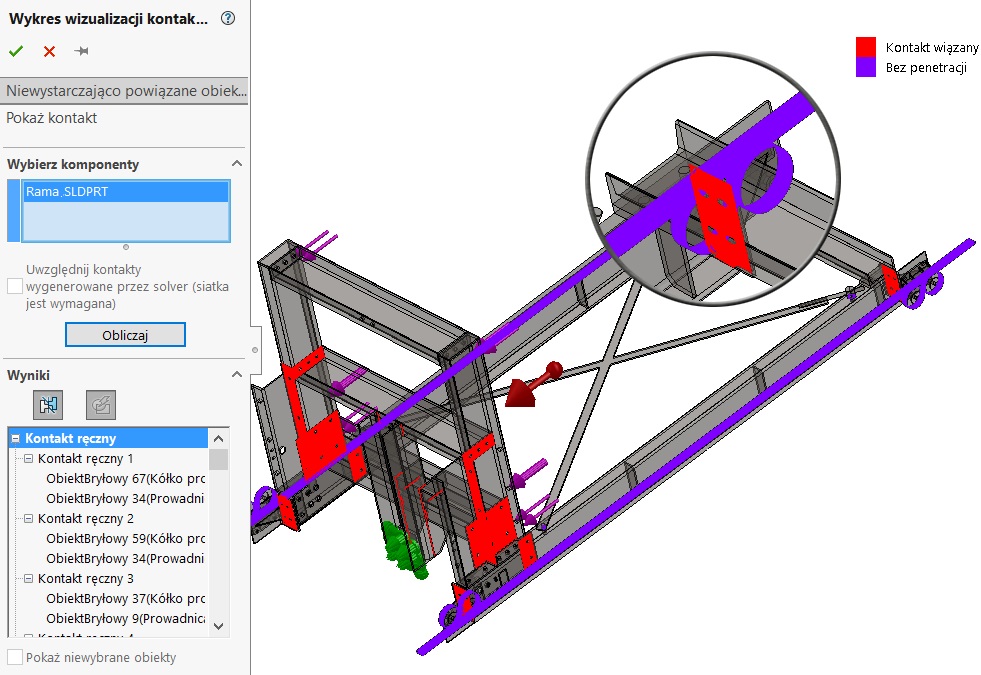
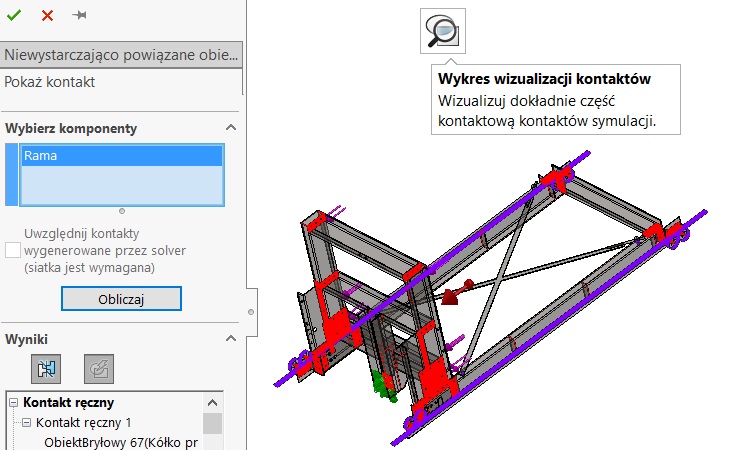
In the chart you can see the visualization contacts, how they are connected to objects in the multibody parts or assemblies of parts. Before starting the analysis can detect the contact areas used by global contacts and settings all sets of local contact.
To view a contact without penetration between walls, which not initially contact, select Include contacts generated by Slover (required grid).